PMSM Description

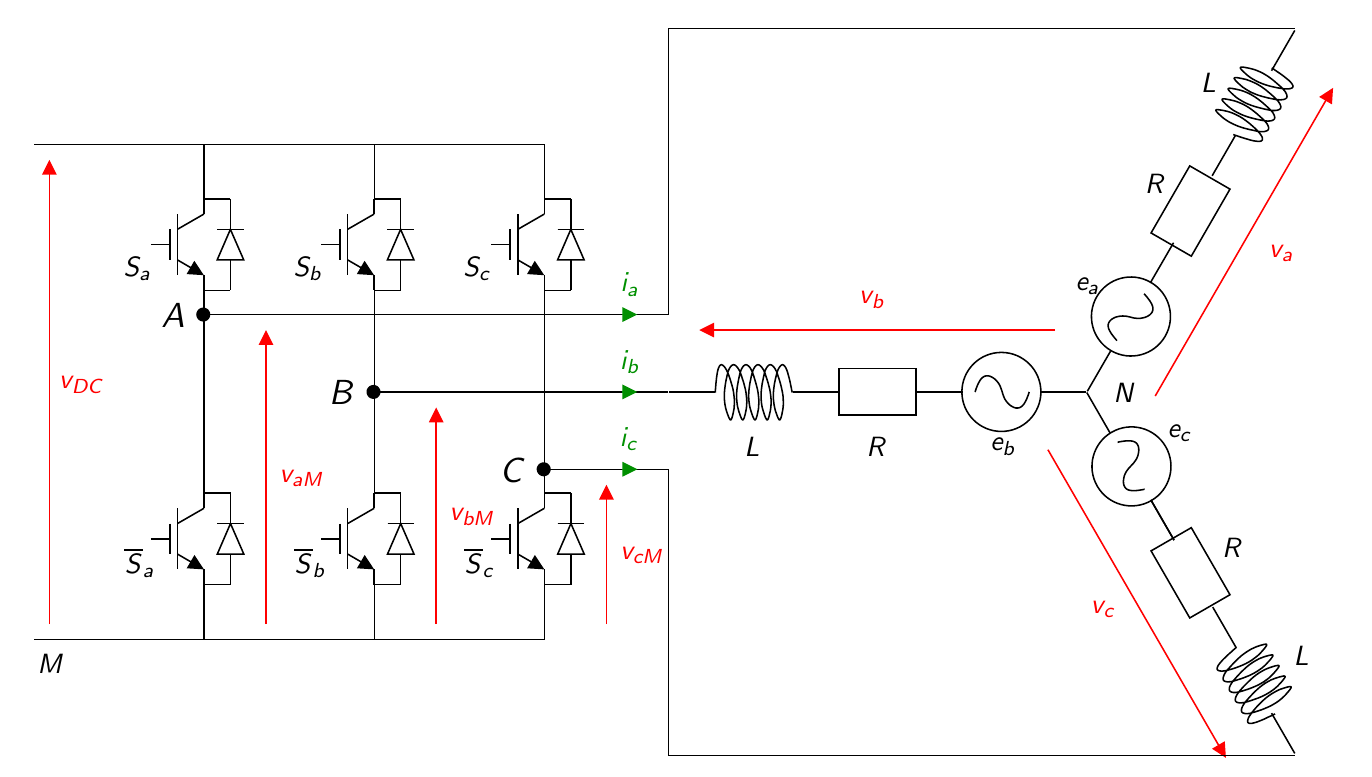
Operative part scheme
The figure below represents the whole system including the motor and its inverter.
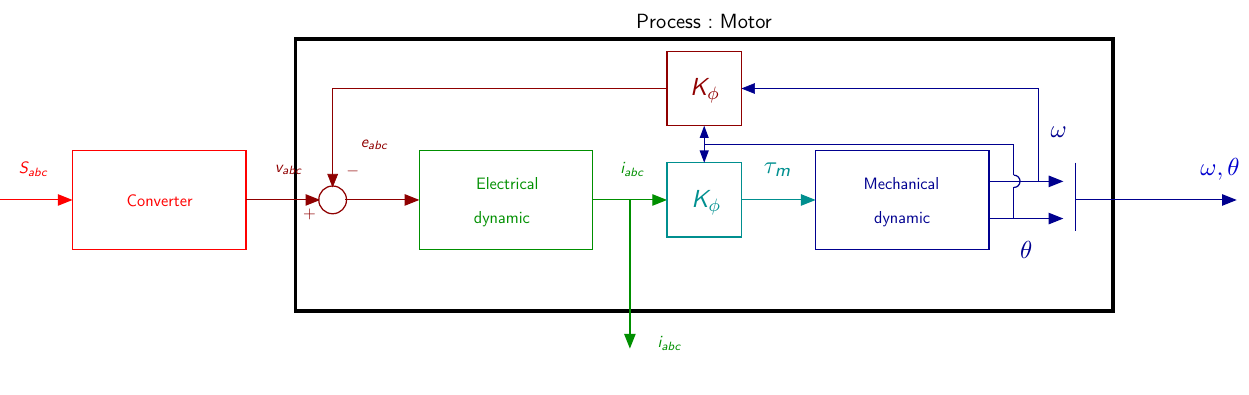
The system can be described with the following bloc diagram.
PMSM Modeling
The page describes the dynamical equations of the motor as well as the classically used transformations (Clarke and Park).
PMSM Control
In this page, a classical vector control is proposed for the speed control of the motor.